robotics. what is this
- Robot ei tohi oma tegevuse ega tegevusetusega inimesele kahju teha.
- Robot peab alluma inimese antud käsule, kui see ei lähe vastuollu esimese seadusega.
- Robot peab kaitsma oma olemasolu, kuni see ei ole vastuolus esimese või teise seadusega.
Peale nende kolme seaduse mõtles Asimov hiljem välja ka nullseaduse, mis on järgmine:
0. Robot ei tohi oma tegevuse või tegevusetusega inimkonnale kahju teha.
robootika – роботика
põhiseadus – основной закон
ulmekirjanik – фантаст
esmakordselt- впервые
tegevus- действие
tegevusetus- бездействие
alluma- подчиняться
käsk- кнопка
vastuolu- противоречиу
kaitma- защищать
nullseadus- нулевой
andur- датчик
täitur- исполнитель
kontroller- исполнитель
totmistöö- производство
kauguseandur- датчик расстояния
valguse andur- датчик света
põlvkond- поколение
voolu- ток
Mis on robot? Maailma esimene robot.
*Autod, koduelektroonika ning isegi mõned innovatiivsed mänguasjad on teatud mõistes robotid
*Kõige esimeseks robotiks loetakse 1961. aasta kevadel tööd alustanud General Motors’i autotehase robotit nimega Unimate
Robotite arendamis põlvkonnad. Nimeta ja seleta.
on moodustatud kolm põlvkonda roboteid:
reeglid
*Esimese põlvkonna roboteid (programmjuhtimisega) kasutatakse: tööpinkide, presside, ahjude, keevitusseadmete ja -masinate hoolduseks; peamiste tehnoloogiliste protsesside (lõikamine, monteerimine, keevitamine) elluviimine; peale- ja mahalaadimine ning laotoimingud.
*Teise põlvkonna robotid erinevad esimese põlvkonna robotitest tundlike seadmete (puutetundlik, telerinägemine) olemasolul, neil on keerulisem juhtseade.
*Kolmanda põlvkonna robotid (integreeritud robotid) töötlevad erinevalt teise põlvkonna robotitest meeltelt saadud teavet. Neid roboteid kasutatakse mustrituvastust nõudvatel töödel (joonistustööd), samuti keerulistes ja muutuvates tingimustes.
| Esimene põlvkonna | Teine põlvkonna | Kolmas põlvkonna |
| automaatselt süttiv lamp nõudepesumasin | fikseeritud liikumisega robotkäsi ise keeli õppiv robot |
Miks manipulaatorid ei ole robotid?
Erinevalt väärarusaamadest pole manipulaatorid robotid, kuna neid juhib vahetult inimene
Mis on masinate eelised võrreldes inimtööjõuga?
Kuna robotid on mehhaanilised seadmed, siis nad ei väsi ega tüdine, mis teeb nad ideaalseteks
rutiinse töö tegijateks.
Lisaks ei ole robotid nii tundlikud töötingimuste koha
pealt kui inimesed, neid saab kasutada ka mürarikastes halvasti valgustatud töökohtades ja isegi
sellistes kohtades, kus inimese töötamine on eluohtlik kiirguse vms tõttu.
Millised kolm tingimust peavad olema täidetud, et teatud masinat või seadet saaks robotiks nimetada?
*Robot ei tohi oma tegevuse käigus või tegevusetusega inimesele viga teha.
*Robot peab täitma inimese käsklusi, kui need pole vastuolus esimese seadusega.
* Robot peab kaitsma oma olemasolu, kuni see ei lähe vastuollu esimese ega teise seadusega.
Millistes Eesti tööstusettevõtetes võiksid mehhatroonikud töötada?
Mehhatroonika töötab metallitöötlemise, masinaehituse ja instrumentide valmistamise ettevõtetes
Robot – autonoomne seade(tegutseb ilma inimese juhtimata), mis koosneb kontrollerist, andurist ja
täiturist.
Robootika – tehnikateaduse ja tehnoloogia valdkond, mis tegeleb kõigega, mis on vajalik robotite
ehitamiseks: disain, konstrueerimine, algoritmide väljatöötamine, robotite valmistamine ja rakenduste
leidmine.
Manipulaator -kaugjuhitav seade, mida kontrollib enamasti eemalt inimene. Manipulaatori ülesanne
on olla inimese meelte ja lihaste pikenduseks. See tähendab, et läbi manipulaatori saab kontrollija
informatsiooni väliskeskkonna kohta ja saab manipulaatori abiga keskkonda muuta. Keerulisemaid
manipulaatoreid on “pommirobot”.
Mehhatroonika – interdistsiplinaarne tehnikateaduste haru, mis on ühendab endas mehaanika,
elektroonika, arvutitehnika, tarkvaratehnika, juhtimisteooria ja süsteemidisaini eesmärgiga jõuda välja
parema toote loomiseni. Mehhatroonika sõna pärineb prantsuse keelest ja kultuurist.
Andur – seade, mis muudab füüsikalise suuruse (kaugus, temperatuur jne) elektrisignaaliks, mida on
parem edastada, töödelda ja võimendada.
Täitur -Kontroller – väike arvuti, mida kasutatakse protsesside või masinate juhtimiseks. Selleks on
kontrollerile laaditud inimese koostatud programm.
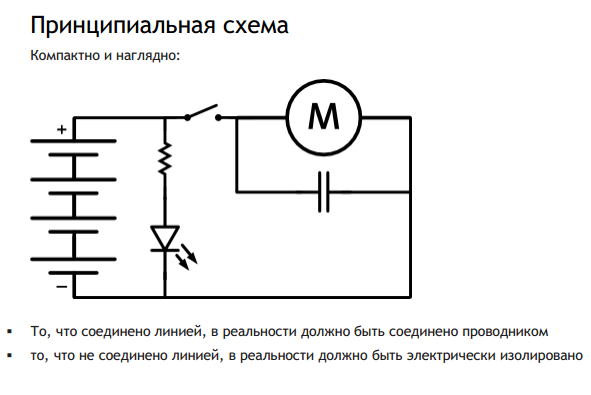
Elekter. Põhikomponeendid
- Elekter on elektrilaengute olemasolust tingitud nähtuste kompleks
- Elektriahel on teatud viisil ühendatud seadmete kogum, mis tagab elektrivoolu liikumise tee. Elektriahela elemendid on: vooluallikas, koormus ja juhid.
4.

5. Jadaühendus
Jadamisi ühendamisel on iga tarbija voolutugevus sama,
pinge on erinev: igas komponendis langeb osa sellest.
Paralleelühendus
Kui ühendada paralleelselt, on pinge iga tarbija ümber sama,
erinev voolutugevus: igaüks tarbib voolu vastavalt omale
vastupanu.
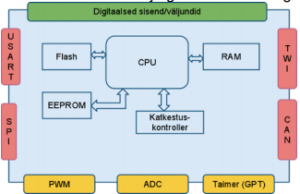
6. Mikrokontrollerit võib võrrelda pisikese arvutiga, mis lisaks oma põhifunktsioonile: instruktsioonide täitmisele, omab ka küllalt laia kiipi integreeritud perifeeriaseadmete ja liideste hulka. Liidesed võimaldavad mingil kokkulepitud standardil toimivat andmevahetust. Mikrokontrolleri põhiosaks on keskprotsessor, mille ülesandeks on sarnaselt tavalise personaalarvuti protsessorile täita programmi käske. Erinevalt tavalisest arvutist on mikrokontrolleris samasse kiipi lisatud veel töömälu (RAM), andmemälu (EEPROM) ja programmimälu (Flash), katkestuste kontroller ja mitmed liidesed, millest tuleb allpool täpsemalt juttu.
Arduino koosneb riist- ja tarkvarast. Need. Kõigepealt paned kokku Arduino plaadil põhineva “elektroonilise ajuga” seadme ja seejärel programmeerite saadud mooduli vastavalt oma vajadustele. Arduino riistvara on trükkplaat, mille pardal on keskne mikrokontroller ja abikomponendid.
Valgusdiood (LED – valgusdiood. Pooljuhtdiood, mis kiirgab valgust.
Nupp – surunupp on nupp, mis võimaldab teil elektroonilist signaali katkestada või saata.
Fototakisti – Fototakisti (ingl LDR light dependent resistor) on pooljuhtseadis, mille takistus väheneb valguse, infrapuna- või ultraviolettkiirguse toimel.
Takisti – Takisti on elektroonikakomponent mingi soovitava või kindla elektritakistuse tekitamiseks vooluringis.
Potentsiomeeter – Potentsiomeeter on muuttakisti, mida kasutatakse peamiselt elektroonikalülitustes reguleeritava pingejagurina, näiteks helitugevuse sujuvaks reguleerimiseks.
Temperatuuriandur – Temperatuuriandur on seadis, mis teisendab temperatuuri väärtuse enamasti vastavaks elektripingeks.
Servomootor – ervomootor ehk täiturmootor on juhtimiseks kasutatav mootor, mis muudab temaga käitatavate mehhanismide asendit vastavalt etteantud seadesignaalidele.
Mootor – DC mootor
Vedelkristallekraan – Vedelkristallid on piklike molekulidega (pikkus 1–3 nm, läbimõõt 0,5–1,0 nm) orgaanilised ained, mis temperatuuri tõstmisel ei muutu tahkest olekust kohe vedelaks, vaid on laias temperatuurivahemikus (ca −10 °C kuni +70 °C) vedelkristallilises olekus.